解决的问题
解决使用旋转卡尺或者PCA分解生成错误heading角的问题。
论文基本思路
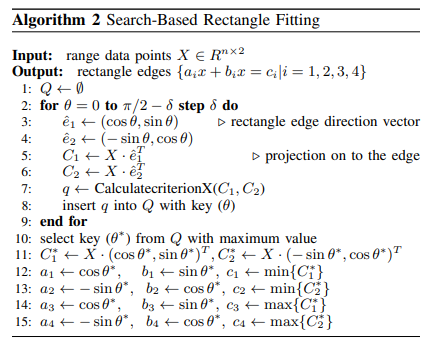
- 将90度n等分,旋转坐标系,计算所有点在新的方向上形成点的坐标
- 计算这些坐标值按照目标函数给出得分
- 选定得分最高的方向最为航向角方向
实测效果
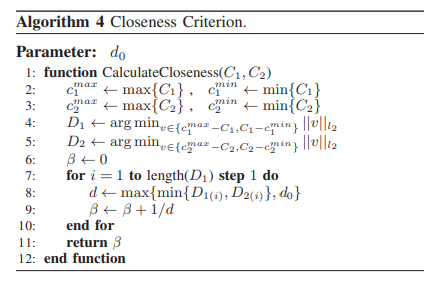
论文中针对拟合得分,有三种代价函数,最小面积,最小距离,最小方差。自己实测下来最小距离在速度型效果上最优。
主干部分
论文原文给的伪代码:
自己的C++的复现 代码核心逻辑部分: 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18// 前提 输入点云cloud为XYZI的PCL点云格式
const auto &data = cloud->getMatrixMap(2, 8, 0).transpose();
Eigen::Vector2f e1, e2;
float best_score, best_heading;
for (int i = 0; i <= n; i++)
{
//生成当前迭代角度
float theta = i * MP_PI_/ n;
e1 << cos(theta) , sin(theta);
e2 << -sin(theta) , cos(theta);
//计算投影点
Eigen::VectorXf c1 = data * e1;
Eigen::VectorXf c2 = data * e2;
// 生成得分
float socre = ClosenessCriterion(c1,c2);
// 比较当前得分是否为历史最佳得分 更新float best_score, best_heading
...
}
代价函数部分
论文原文给的伪代码:
自己的C++的复现 代码核心逻辑部分: 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17float ClosenessCriterion(c1, c2)
{
constexpr float d0 = 0.1;
// 这里不用Eigen的函数接口自己迭代会更快 少两轮迭代
float c1_max = c1.maxCoeff();
float c1_min = c1.minCoeff();
float c2_max = c2.maxCoeff();
float c2_min = c2.minCoeff();
Eigen::VectorXf v1 = c1_max - c1.array();
Eigen::VectorXf v2 = c1.array() - c1_min;
Eigen::VectorXf d1 = v1.norm() < v2.norm() ? v1 : v2;
v1 = c2_max - c2.array();
v2 = c2.array() - c2_min;
Eigen::VectorXf d2 = v2.norm() < v2.norm() ? v1 : v2;
Eigen::VectorXf b = 1 / d1.cwiseMin(d2).cwiseMax(d0).array();
return b.sum();
}
一些注意事项
- PCL点云使用getMatrixMap()直接映射成Eigen矩阵,减少点云拷贝。
- 项目代码中 避免Eigen自动内存管理可以手动管理空间,用Eigen的Map方法将矩阵映射到自己分配的空间中,在乘法中使用.noalias()方法让矩阵乘法的结果直接生成在预先分配好的内存地址上。